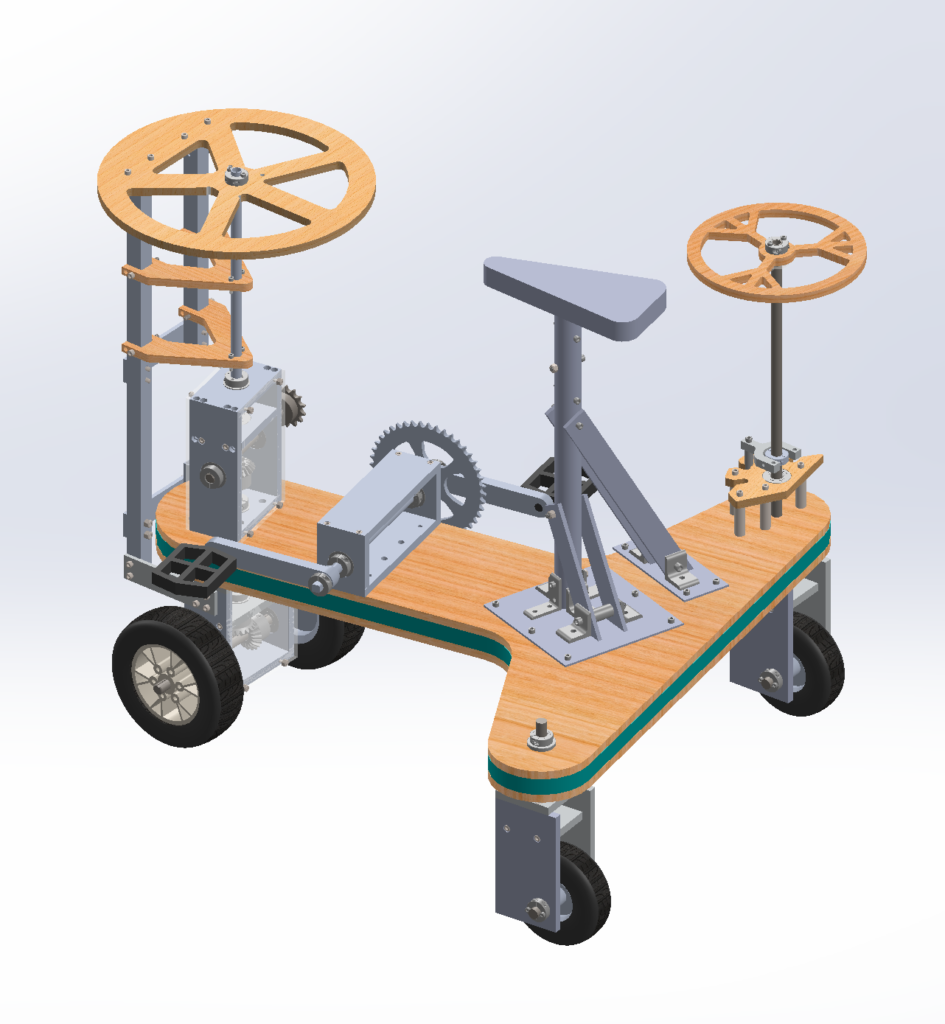

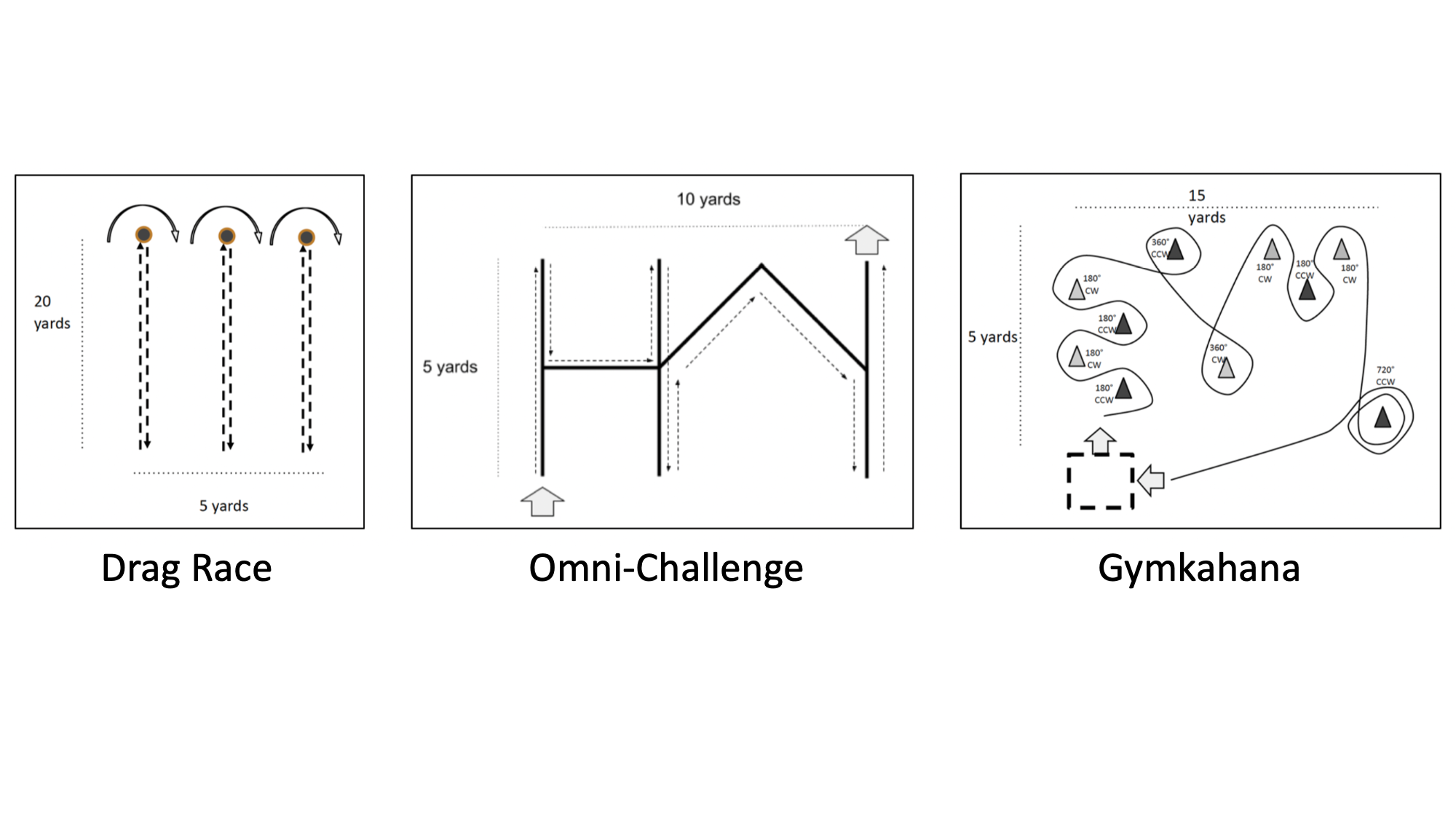
I collaborated on a team of three to design and build a pedal-powered omni-directional vehicle. The objective was to create an omni-directional, human-powered vehicle that could navigate three predetermined challenges: a drag race, an Omni-Challenge, and a Gymkhana course. The weight of the vehicle was limited to 75 lbs. The vehicle won two of the three challenges, and the overall competition on race day.
{kind=link}
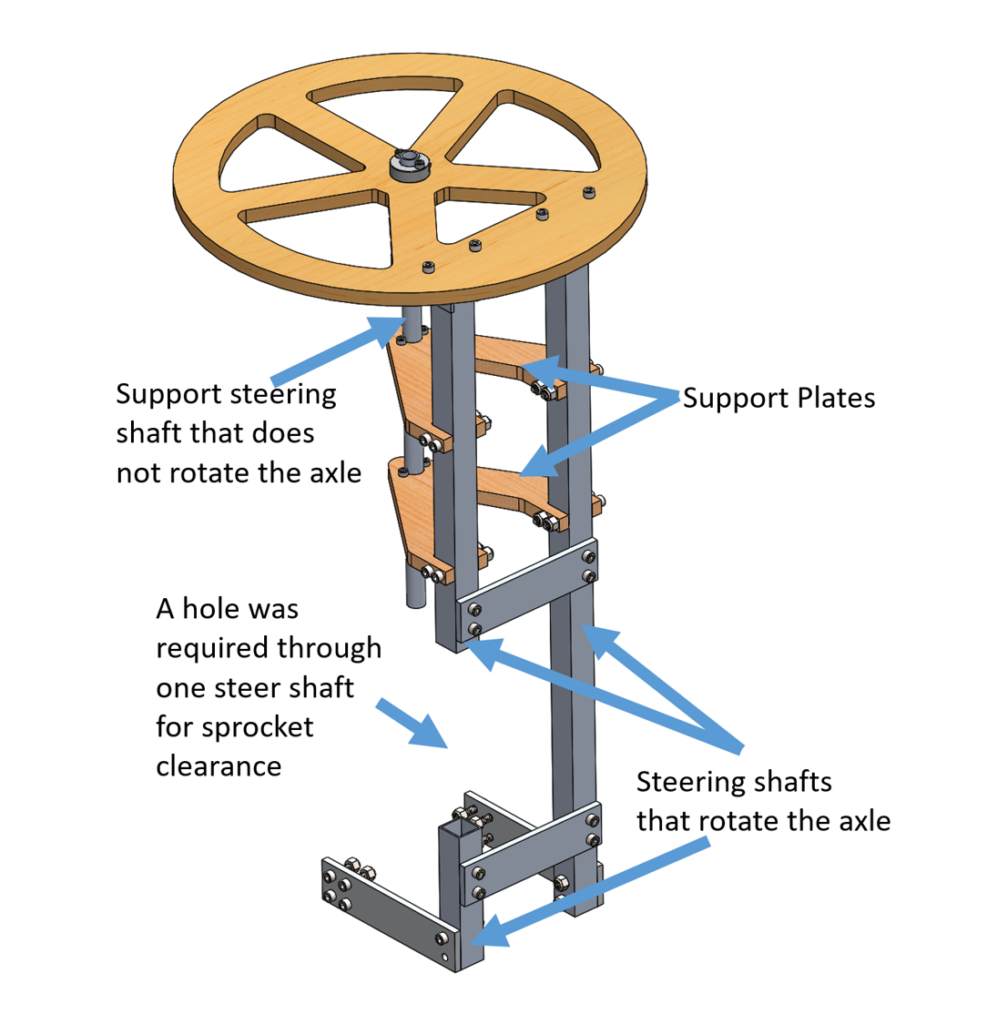
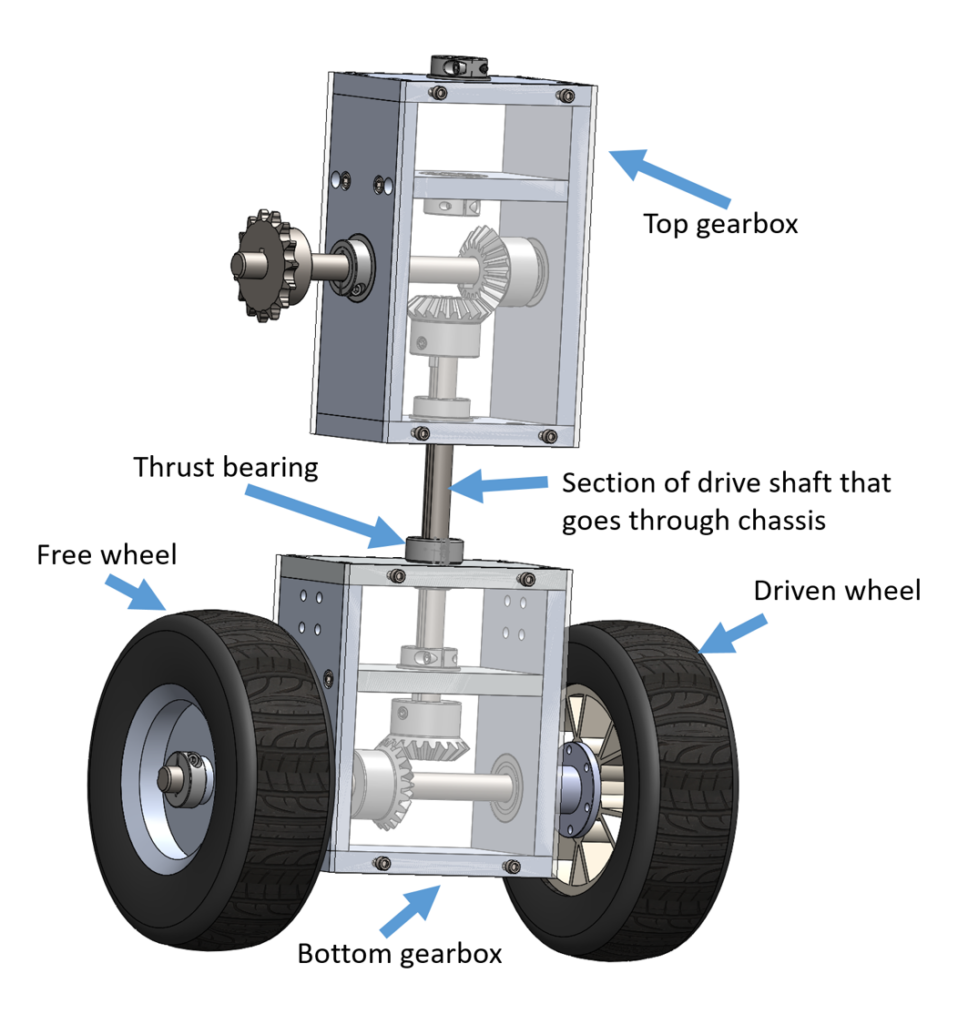
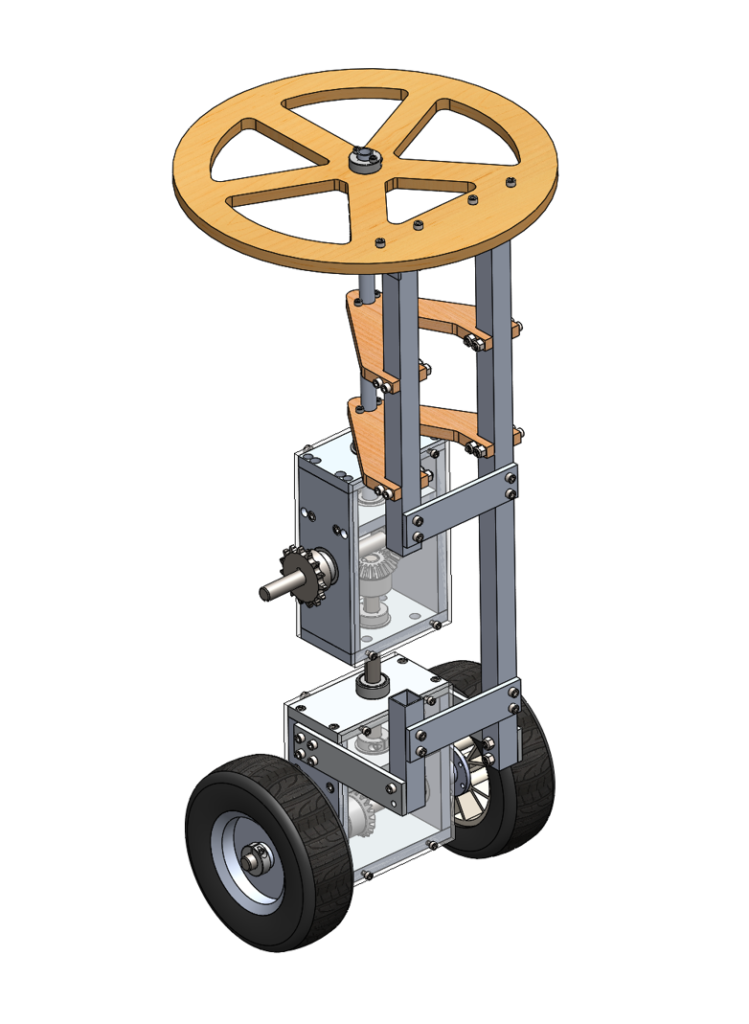
I designed the gearbox, steering, and pedal systems in Solidworks. The front drive system powered one of the front wheels, while the steering system could steer the front wheels through a range of 180°. I created drawings to machine components I designed.
I constructed vehicle components with a mill, lathe, and Shopbot.

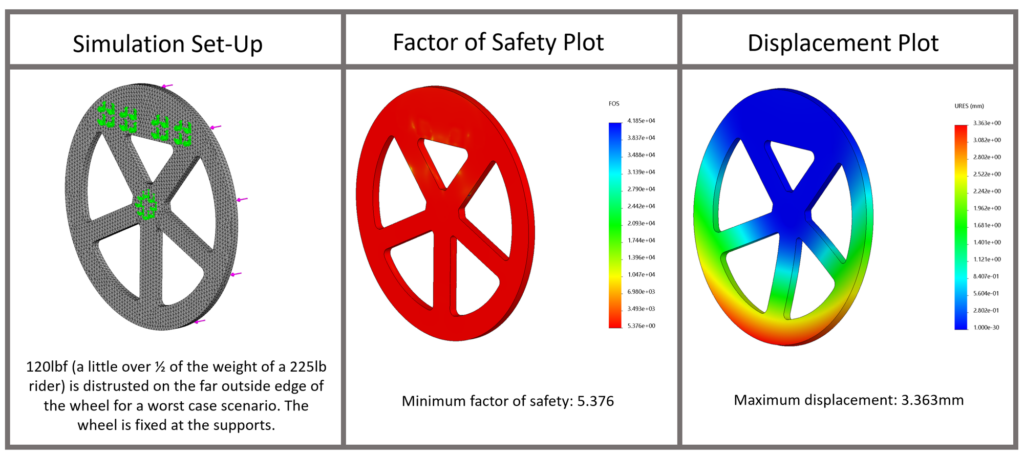
I also conducted analyses on key components that were likeliest to fail during driving for the front gearboxes, front driving system, and pedal system.