I worked on a team of four to design and fabricate a robot to recycle cans. I designed the scissor lift for the robot using Solidworks, and created drawings for parts for robot construction with Solidworks. I used a laser cutter to fabricate components of the robot.
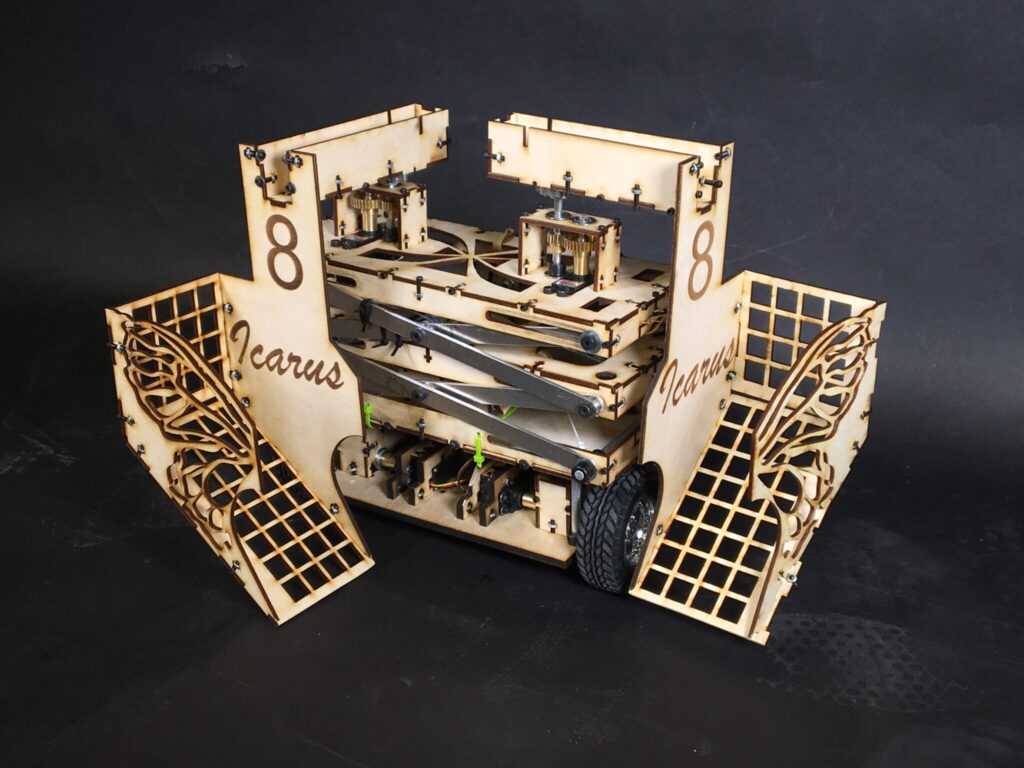
The grabbing “wing” mechanisms rotate on servo motors to grab cans and other recycling. The scissor lift lifts the wings once a recyclable has been grabbed, and brings the wings above the height of the bin that the recyclable is to be deposited in. The robot then drives forward, and the wings are opened while directly above the bin. Once the recyclable is deposited, the wings swing shut, the robot backs up, and the scissor lift drops.